Pero el Arte va aún más lejos, imitando la obra más racional y excelente de la Naturaleza que es el hombre. Pues mediante el Arte se crea ese gran Leviatán que se llama república o Estado (…), y que no es sino un hombre artificial, aunque de estatura y fuerza superiores a las del natural, para cuya protección y defensa fue pensado.
Licklider y la simbiosis hombre–máquina
Joseph C. R. Licklider, contemporáneo de Claude Shannon, había estudiado psicología en la Universidad Washington de San Luis, y tras obtener un doctorado en psicoacústica ingresó en Harvard. Su interés en conocer el modo en que interactuaban el cerebro humano y las máquinas lo llevó a trasladarse al MIT para poner en marcha una sección de psicología integrada en el departamento de ingeniería eléctrica, uniéndose allí al grupo de ingenieros, psicólogos, matemáticos y humanistas que se reunían semanalmente en torno a Norbert Wiener[122]. Como éste, Licklider creía en la colaboración del hombre con las máquinas y desconfiaba de quienes pensaban que éstas sustituirían a la mente humana. En 1960 publicó un artículo titulado La simbiosis hombre–computador en cuyo sumario escribía[123]:
La simbiosis hombre–computador […] Implicará una estrecha unión entre los humanos y los miembros electrónicos de la asociación. Sus principales propósitos son: 1) que los computadores faciliten pensamiento formulativo como ahora facilitan la solución de los problemas formulados, y 2) hacer posible que hombres y computadores cooperen tomando decisiones y controlando situaciones complejas sin una dependencia inflexible de programas determinados a priori. En dicha asociación simbiótica, los hombres establecerán los objetivos, formularán las hipótesis, determinarán los criterios y llevarán a cabo las evaluaciones. Las máquinas harán el trabajo rutinario que se necesite para preparar el camino a perspectivas y decisiones del pensamiento técnico y científico. Análisis preliminares indican que la asociación simbiótica realizará operaciones intelectuales de forma mucho más efectiva que el hombre solo. Entre los prerrequisitos para lograr una asociación cooperativa efectiva están los desarrollos en el uso del tiempo compartido en los computadores, en componentes y organización de memoria, en lenguajes de programación, y en equipamiento de entrada y salida.
Con John McCarthy, en el MIT había trabajado en la manera de conectar un gran número de terminales a un mismo ordenador de forma que el usuario tuviera una interfaz directa con la máquina y ésta, aparentando a través de esa interfaz estar dedicada a la tarea que el usuario en cuestión le hubiera encomendado, estuviera en realidad distribuyendo eficazmente el tiempo dedicado a cada una, como si fuera «un gran maestro jugando simultáneamente docenas de partidas de ajedrez»[124]. La sensación del usuario, ahora tan familiar que pasa desapercibida cuando trabajamos en red, era que la máquina trabajaba solo para él. Esto implicaba encontrar estrategias que permitieran a las personas interactuar de un modo más simple con las máquinas, y exigía que la información se presentara de forma más intuitiva en el extremo humano de la interfaz y con menos ambigüedad en el extremo de la máquina. Y de ahí los requisitos previos que estableció en su trabajo de 1960.
Licklider fue el precursor intelectual de dos conceptos importantes para el desarrollo de internet: las redes descentralizadas para la distribución de la información desde y hacia cualquier parte, y las interfaces para la interacción hombre–máquina en tiempo real. Además fue el fundador y director del organismo militar que financió el proyecto ARPANET que, años más tarde, daría lugar a internet.
§
Nuestro diccionario define simbiosis como la «asociación de individuos animales o vegetales de diferentes especies, sobre todo si los simbiontes sacan provecho de la vida en común». Para considerar, por tanto, la vida en común o la colaboración como verdadera simbiosis, hemos de tomar una perspectiva más amplia en la que ambas especies saquen provecho. Así, el pastor y sus ovejas no actúan como simbiontes, y sí lo hacen el pez payaso cuando nada entre los tentáculos de la anémona: como un perro protege el territorio de peces comedores de anémona, y los tentáculos de ésta protegen al pez de sus depredadores. Así, lo que Licklider quería decir con simbiosis hombre–computador no era el mero uso de esas máquinas por los humanos para su provecho, sino que apuntaba algo más lejos[125]:
La esperanza es que, en no muchos años, los cerebros humanos y las máquinas computadoras estén unidos muy estrechamente, y que la asociación resultante piense como ningún cerebro humano ha pensado nunca y procese datos de una manera a la que no se aproxima ninguna máquina que maneje información hoy en día.
En el pasado, decía Licklider, en cualquier entorno en el que convivieran seres humanos y máquinas como un todo orientado a un mismo fin, desde el primate que utiliza el hueso para romper huesos en 2001, al operador humano le correspondía llevar la iniciativa, la dirección, siendo las partes mecánicas del sistema meras extensiones, primero de la mano, después del ojo, más tarde, podríamos añadir nosotros, de su capacidad de cálculo y de manejo de información; en definitiva extensiones de sus dispositivos de percepción, cómputo, razonamiento y actuación. Esto no es poco, pero este hombre ‘extendido’ o ‘aumentado’ no es una simbiosis pues hay solo un organismo, el humano, que se beneficia y el resto está solo para servirle. ¿O no?
Pensemos en una máquina para obtener imágenes médicas que se complementa con un software cuyo propósito es diagnosticar la existencia o no de, por ejemplo, cáncer de mama. En la medida en que la máquina está concebida para ese fin y la función del médico es diagnosticar para curar, cabría preguntarse si en una sesión conjunta de radiólogo y máquina es ésta quien ayuda al radiólogo o es éste quien ayuda a la máquina.
Conceptos de sistemas ciberfísicos
En la actualidad se pueden encontrar diversas definiciones de sistemas ciberfísicos. Veamos algunas de ellas aparecidas recientemente en la literatura especializada: 1) sistemas de ingeniería caracterizados por la integración de comunicaciones, control y computación en un sistema gobernado por las leyes de la física, ya sea éste natural o artificial (hecho por el hombre); 2) sistemas que integran comunicaciones, computación, control y tecnologías en red en un sistema físico subyacente; 3) sistemas que integran computación, intercomunicación y procesos físicos[126].
En primera instancia, parecería que el nuevo término, ciberfísico, no viene sino a nombrar los sistemas en los que podemos encontrar comunicaciones, control y ordenadores gobernando, por ejemplo, la trayectoria y la velocidad de un tren o una reacción nuclear; y acertaríamos al pensar que para este viaje no hacían falta alforjas, que solo es un nombre distinto para algo que ya existía. Pero el énfasis, puesto que la cibernética y la física ya estaban inventadas, hay que ponerlo en la integración, término que en todas sus acepciones considera un ‘todo’, un conjunto indivisible o inseparable de los elementos que componen algo. Y ésta es la característica diferencial de estos sistemas, no que en ellos podamos encontrar procesos naturales, artefactos creados por el hombre y cibernética (comunicación y control), sino que estos elementos forman un todo en concepción, diseño y explotación.
Hoy se pueden encontrar en todos los dominios de aplicación: producción de energía, transporte, fabricación —la llamada Industria 4.0 no es sino un caso particular, y la internet de las cosas, IoT, una de sus herramientas—, medicina, infraestructuras críticas, robótica distribuida, defensa, etc. Mas para ello no solo han sido necesarios avances en las técnicas y las tecnologías que les dan soporte, sino el establecimiento de nuevos paradigmas y la invención de nuevos lenguajes que permitan a disciplinas tradicionalmente separadas (la informática y la mecánica, la medicina y el control, las comunicaciones y la energía) trabajar juntas desde la misma concepción del sistema.
Las capacidades, y por tanto la autonomía, de estos sistemas pueden alcanzar distintos niveles. Si atendemos a las principales componentes, o tecnologías facilitadoras, la comunicación y la computación, podemos vislumbrar la evolución de los sistemas ciberfísicos en la figura 4.1. En el eje horizontal, al que podríamos denominar eje Turing, tenemos la capacidad de computación que, combinando la mayor densidad y rapidez de los dispositivos electrónicos con los nuevos desarrollos en técnicas de programación, permiten alojar cada vez más ‘inteligencia’ en los sistemas. En el primer nivel de este eje se da una capacidad puramente ‘instintiva’, reactiva ante las perturbaciones del entorno, como las tortugas de Grey Walter o el control del llenado de un depósito mediante una bomba. En el segundo, ya existe la capacidad de aprender y reaccionar ante el entorno utilizando un patrón o serie histórica, como cuando identificamos una cara o un sonido. El nivel más alto lo ocupa la capacidad deliberativa, que permite, por ejemplo, planificar la secuencia de acciones necesarias para llevar a cabo una tarea compleja o saber cómo reaccionar ante una nueva experiencia. En el eje vertical, que podríamos dedicar a Shannon, podemos ver cómo la capacidad de comunicación, entendida ésta como capacidad de interconexión y trabajo en equipo con otros ‘individuos’, hace emerger en el conjunto características que no estaban en sus componentes aislados. Conseguir el nivel extremo, el de la deliberación conjunta, es un gran logro, y sin embargo aún nos quedarían por cubrir, incluso en la clasificación de alguien tan defensor de la inteligencia artificial como Marvin Minsky, tres niveles de actividad mental, los que él llama, en orden ascendente, pensamiento reflexivo, pensamiento auto-reflexivo y reflexión (emoción) auto-consciente (ver figura 4.2). Mientras alcanzamos esos niveles en las máquinas, siempre podremos poner a un humano en el sistema. Advirtamos, no obstante, que el mero hecho de que un humano intervenga no lo hace parte del sistema ciberfísico, sino que para ello tiene que darse una efectiva ‘integración’.
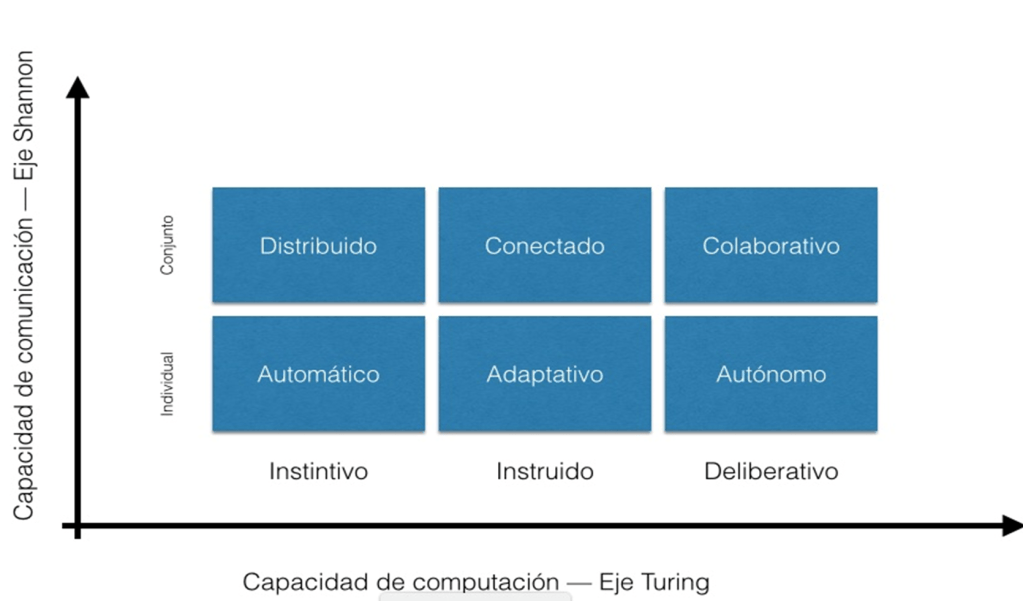
(Figura adaptada de Allgöwer, op. cit.).
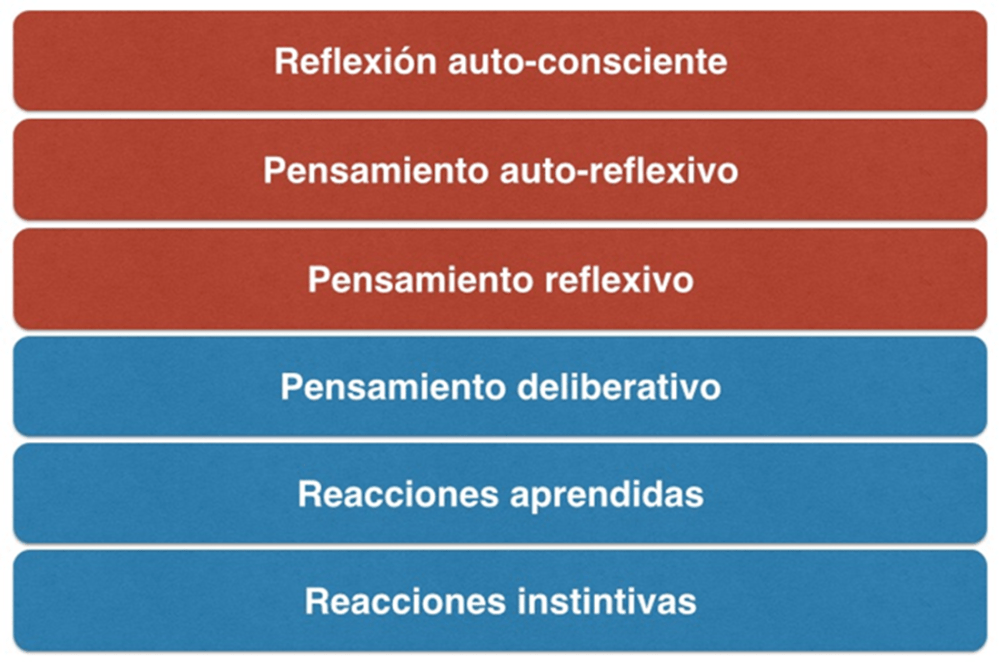
(Figura adaptada de: Minsky, M. (2006). The Emotion Machine. Simon & Schuster).
Humano en el lazo
En diciembre de 1947 y marzo de 1948 se publicaron, de forma póstuma, las dos partes de un trabajo de Kenneth Craik, Theory of the Human Operator in Control Systems. El material publicado pertenece a un borrador preparado por Craik entre marzo y abril de 1945, un mes antes de morir en un accidente, pero, según los editores, responde en lo fundamental a la forma y la intención que su autor tenía en mente.
En la primera parte, titulada El operador como un sistema de ingeniería[127], Craik caracteriza la actividad humana, por ejemplo el seguimiento visual de un objeto, utilizando términos propios de la entonces incipiente teoría de control, términos tales como realimentación negativa, servomecanismo o error de seguimiento, términos que, por otra parte, había puesto de moda la Segunda Guerra Mundial; y llega a las siguientes conclusiones: 1) el operador humano se comporta básicamente como un servo de corrección intermitente; 2) esta corrección intermitente consiste fundamentalmente en movimientos ‘balísticos’; y 3) con modelos eléctricos se puede simular con bastante exactitud el comportamiento del operador humano en tareas de seguimiento.
En la segunda, que lleva el título El hombre como elemento en un sistema de control[128], propone considerar al hombre como una cadena compuesta de: 1) dispositivos sensoriales, 2) elementos de computación, 3) sistema de amplificación y 4) vínculos mecánicos. Es decir, los elementos básicos de un sistema de control realimentado. Tal consideración, escribe Craik[129],
sirve para salvar la brecha entre la declaración fisiológica del hombre como un animal con respuestas reflejas y aprendidas ante estímulos sensoriales, y la ingenieril en términos del tipo de mecanismo que se diseñaría para llevar a cabo la misma función en un sistema totalmente automático.
El problema, continúa, es determinar las características de los eslabones de esta cadena con objeto de mostrar las ventajas y desventajas del operador humano comparado con un sistema automático. Después propone algunas técnicas para investigar este problema y da algunas características de los «dos primeros pasos en la cadena de respuesta», los sensores y el sistema de computación. Lo importante aquí para nosotros es que, siguiendo los pasos iniciados en The Nature of Explanation de 1943[130], se caracteriza al ser humano en términos de máquina para comparar sus comportamientos, aunque solo sea en los dos primeros niveles de actividad mental antes mencionados: respuestas reflejas y aprendidas ante estímulos.
Con Craik está tendencia no había sino comenzado y, por hacer una parada intermedia, ya en 1959 Duane T. McRuer y Ezra S. Krendel publicaron dos artículos[131] en los que estudiaban el operador humano como elemento de un servomecanismo dando una descripción cuantitativa de la ‘dinámica humana’ y haciendo modelos de comportamiento de la misma en términos «compatibles con descripciones convencionales de componentes de sistemas de control»[132]: función de transferencia, función descriptiva, entrada, salida, relacionadas como se ilustra en la figura 4.3 (a), e insertadas en el lazo de control como se muestra en la figura 4.3 (b).

Tanto en estos trabajos como en los pioneros de Craik solo se pretendían modelar los dos primeros niveles de la clasificación de Minsky, pero los avances en los dos ejes coordenados de la figura 4.1, Turing y Shannon, han hecho que podamos acometer niveles más altos.
§
Algunos de los retos a los que se enfrentan en la actualidad los sistemas ciberfísicos con humano en el lazo (CPHS), son los siguientes[133]:
- Preservar la seguridad comprometida conforme su uso se va extendiendo y se van haciendo más complejos y capaces.
- Construirlos de forma que su operación no sea obstaculizada por el mal uso de la automatización debido a poca o demasiada confianza de la parte humana.
- Estimar y utilizar adecuadamente la intención humana.
- Predecir, modelar y usar el comportamiento humano.
- Compartir las responsabilidades de forma eficiente y segura.
- Desarrollar sensores, herramientas y algoritmos para medir o estimar los movimientos y las emociones humanas.
En un caso típico de colaboración humano–robot, por ejemplo, necesitaríamos un sistema de captura de movimiento con visión para estimar la trayectoria que el humano pretende seguir de forma que la referencia del robot suponga un movimiento seguro del mismo. También se ha investigado cómo nuestras tendencias de comportamiento, en cierta forma muy simplificada nuestro carácter, afectan a la toma de decisiones (se hace uso de lo que hoy se llama ‘economía de comportamiento’ o conductual), y cuál es el papel específico de la realimentación en los sistemas con humano en el lazo, realizando los experimentos sobre un sistema en el que una persona pilota un dron en entornos con riesgo e incertidumbre[134]. Supongamos que el dron proporciona información sobre el estado del tráfico en ciertos cruces, que cuantas más veces visite los cruces más precisa y útil será la información, pero que con cada vuelo aumenta el riesgo de que el aparato se estrelle. Conociendo los datos el operador decide cuántas veces se sobrevuelan los cruces, por lo que comportamiento global del sistema dependerá de las tendencias del operador humano, como cuando en la carretera unos conductores deciden adelantar y otros no disponiendo del mismo espacio libre de obstáculos. Además, parece ser que, a diferencia de lo que ocurre con las máquinas, los humanos no siempre hacemos mejores estimaciones o tomamos decisiones más acertadas con más información realimentada.
Otras aplicaciones de los CPHS proponen compartir la responsabilidad entre humano y máquina. Pronto sistemas como estos serán de uso general en nuestros vehículos, y se pueden utilizar diversas estrategias o arquitecturas[135]: que el piloto automático ejerza las tareas de control hasta que ocurra cierto tipo de evento para el que se considere necesaria la capacidad de maniobra del piloto; que el piloto actúe como supervisor, y cuando la capacidad de maniobra sea baja pueda evaluar la situación y transmitir entradas auxiliares necesarias al piloto automático; o realizar un esfuerzo de control combinado actuando de manera continua, pudiendo el operador humano acatar o descartar la ayuda del piloto automático. En todos los casos será preciso incluir en el diseño modelos del piloto humano, de sus umbrales de percepción y de las variaciones en presencia de anomalías.
§
Desde los primeros trabajos de Kenneth Craik es necesario disponer de un modelo de comportamiento del ser humano, y cuán sofisticado sea ese modelo y hasta qué nivel deba subir en la escala de Minsky dependerá de las funciones que tenga asignadas en el sistema y que formen parte integral del mismo. Hasta el momento, ningún sistema parece haber pasado del tercer nivel, pero la sofisticación de los modelos aun en un mismo nivel puede variar mucho, pues en definitiva depende del número de características que se quieran tener en cuenta —no necesariamente un modelo es mejor por ser más sofisticado, o complejo; ello dependerá mucho de la aplicación—. Uno de los últimos hitos en este proceso es el desarrollo de gemelos digitales para los humanos que intervienen en el sistema[136]. El gemelo digital supone una representación virtual que sirve de homólogo de un objeto o proceso físico, y empieza por ser una mejora en el modelo de simulación de dicho objeto o proceso. Anticipado por David Gelernter en su libro Mirror Worlds de 1991 cuando escribía que esos mundos espejo «son modelos software de algún pedazo de realidad, algún trozo del mundo real que está fuera de tu ventana»[137], el concepto fue presentado públicamente por Michael Grieves en 2002[138], aunque lo había aplicado antes. La puesta de largo le vino cuando la NASA lo utilizó en 2010 para el diseño de sus aeronaves y ahora su utilización se ha extendido a muchos campos (manufactura, defensa, medicina, automoción)[139]. Sea cual sea el campo o la finalidad, hacer un gemelo digital del ser humano implica, de nuevo, hacer un modelo del mismo; supone, en definitiva, descartar muchas cosas para quedarnos con unas pocas que estimamos útiles para nuestros propósitos; y significa, sobre todo, que para que todo el conjunto funcione según lo previsto la entidad original, el humano, debe comportarse como la entidad digital, su gemelo —¿su ‘avatar’?—, convirtiéndose así en un ‘holón’ más del sistema. En fin, un largo recorrido para invertir el juego de la imitación ideado por Turing y hacer que el humano pase por una máquina; para estar, en lo fundamental, tal vez, muy cerca de donde empezamos: me pregunto si hay diferencias esenciales entre los trabajadores de R.U.R. y los que operan en un sistema que les exige que se comporten según el modelo de aplicación que de ellos se ha concebido.
La simbiosis de Licklider y el Turingware de Gelernter
En el libro antes citado David Gelernter apuntaba[140]:
¿Por qué el edificio en el que trabaja no puede ser un robot? ¿O el coche que conduce? Una manera de entender lo que estamos haciendo realmente cuando instalamos redes de sensores y actuadores en fábricas, etc. es que estamos ‘convirtiendo esa cosa en un robot’. La intención es trasplantar no el aspecto físico de humanos o animales, sino una versión abstracta del sistema nervioso y, en algún sentido primitivo de bajo nivel, el cerebro.
Es una cuestión de perspectiva, decía, y ponía como ejemplo un coche, un ejemplo que hoy podemos comprender mejor que en 1991, cuando se publicó el libro. Ya entonces los coches incorporaban mucha cibernética, pero ahora mucha más. Sin embargo, decía Gelernter[141],
los circuitos no están integrados, no forman juntos una versión electrónica del coche completo [un gemelo digital]. Si su coche es un robot [sistema ciberfísico], por otra parte, debe saber cómo hacer las cosas como unidad, y deberíamos ser capaces de interactuar y ‘conversar’ con él como un todo integrado [sistema ciberfísico con humano en el lazo][142].
De igual forma que el coche, podríamos considerar el edificio donde trabajamos, donde una red de sensores mide la temperatura, la presencia y la iluminación, y una red de actuadores permiten que, establecida una estrategia y tomada una decisión en los elementos encargados de ello, la temperatura y la iluminación sean adecuadas a la presencia. Así, continuaba[143],
Una fábrica puede ser un robot; o una planta de producción de energía, un avión, la red del metro… Un ‘robot erigido’ está al corriente de su estado actual … y [es] capaz de reaccionar a él. Cualquier conjunto de máquinas físicas, más un sistema nervioso sintético —una red que los toca a todos— equivale a un robot erigido.
Llamaba a estos sistemas ‘ensembles’, grupos, pues como un grupo musical eran más que la suma de sus partes, porque es un conjunto de entidades que colaboran, merced a la información que intercambian entre ellos y a su organización, para un mismo propósito (que es otra forma de definir sistema).
Las palabras citadas reverberan en todas las bóvedas soportadas por los pilares de la cibernética, desde el sistema nervioso a las máquinas de Turing. De hecho, Gelernter da un paso más y acuña el término Turingware para designar a «grupos [ensembles] en los cuales los miembros no saben o no se preocupan de si los otros miembros con los que tratan son software o humanos»[144]. Esto es, en otros términos y más de treinta años después, la simbiosis humano–computador de Joseph Licklider, y nuestro pan de cada día.
¿Simbiosis o síntesis?
Supongamos el caso de un sistema que permite dotar de autonomía a personas con capacidades físicas reducidas, proporcionando visión a un ciego, movilidad a alguien que la ha perdido, capacidad de hablar a un mudo, etc. Aquí el humano está en el lazo, ¿pero cuál es su papel?
Tomemos un caso extremo, el de un individuo que padece síndrome de enclaustramiento (LIS) o pseudocoma, una enfermedad en la que el paciente está alerta y despierto, y con sus capacidades cognitivas intactas, pero no puede moverse ni comunicarse verbalmente debido a una completa parálisis de casi todos los músculos voluntarios en el cuerpo excepto, tal vez, los que afectan a los ojos. Supongamos que dotamos al individuo de sensores y actuadores que hacen las funciones que su cuerpo es incapaz de hacer y que le permiten interactuar con el entorno[145]. Como en los casos anteriores, están presentes los tres componentes del sistema, el físico, el cibernético y el humano, pero se pueden observar algunas diferencias notables. En primer lugar, el propio humano, su cuerpo, se podría considerar un elemento más del componente físico, al menos porque, en algunos casos, se podrían estimular los actuadores propios del mismo; y entonces el humano es, al tiempo, operador y objeto sobre el que se opera. En segundo lugar, el objetivo, inmediato, solo y último, del sistema es ‘funcionar’ como un ser humano. Esto hace que el recurso al modelo de comportamiento sea innecesario, y mucho más la exigencia de que el individuo se comporte según el modelo preestablecido, pues el comportamiento que de él se espera es su propio comportamiento, aquel que le dicte, a falta de una expresión más precisa, su libre albedrío.
§
En la simbiosis dos organismos de especies diferentes forman una íntima asociación orientada al beneficio mutuo, pero en los casos que hemos explorado no se ve en qué pueda beneficiarse la máquina, a no ser que se le suponga una ética profesional, una deontología, y que se beneficie así de dicha asociación con el humano para mejor desempeñar su función; o que su supervivencia dependa, de forma consciente para la máquina, de su utilidad. Así pues, si concebimos un beneficio para la máquina derivado de la asociación con el humano deberemos pensar en ambos como simbiontes, pertenecientes a categorías existenciales equivalentes. Mientras, si la actividad es transitiva, si el objetivo está ‘fuera’ del individuo, la máquina sigue siendo lo que era, un medio; y si el comportamiento humano es el fin perseguido en la asociación, ésta sería más bien una ‘síntesis’ y el humano un ciborg.
Daryls vs. Ciborgs
Un helicóptero sobrevuela un paisaje de escarpadas montañas. Un coche va por caminos forestales a gran velocidad. Lo conduce un hombre maduro y en el asiento de atrás va un niño preadolescente. Una pareja de ancianos sale del bosque. El hombre deja su escopeta en la camioneta y arrancan. El coche sigue corriendo. De pronto para, se baja el niño y se interna en el bosque. El coche se cruza con la camioneta mientras el helicóptero lo persigue. En su huida se sale de la carretera y se precipita monte abajo. El helicóptero abandona la zona, no sin antes asegurarse de que el conductor del coche está muerto. Los viejos encuentran al niño. Solo recuerda su nombre, Daryl. Lo llevan a un orfanato y a los pocos días lo acoge una pareja joven hasta que aparezcan sus padres. Daryl, además de unos exquisitos modales y una extraordinaria serenidad, muestra capacidades poco comunes: aprende con gran rapidez a jugar a béisbol o a videojuegos, truca cajeros. Pronto aparecen en el pueblo, haciéndose pasar por sus padres, quienes lo andaban buscando: Daryl (acrónimo de Data Analyzing Robot Youth Lifeform) es un experimento del gobierno. Físicamente indistinguible de un niño de diez o doce años, es un robot con un ordenador por cerebro diseñado con la intención de crear un supersoldado. El hombre que conducía el coche era uno de los participantes en el proyecto que había decidido liberarlo. Aquellos que se hacen pasar por sus padres también participan en el proyecto, y quieren recuperar a Daryl para desmontarlo.
D.A.R.Y.L. es una película de 1985 sin grandes pretensiones artísticas y con final feliz; casi un cuento de hadas. Pero hay un diálogo cuyas implicaciones, dado el tono general de la película, podrían pasar desapercibidas. La familia adoptiva va a las instalaciones militares que alojan el proyecto y allí les dicen lo que es Daryl; y mientras lo observan jugando en su habitación sin que él los vea, se vuelven hacia el ‘experimentador’ que los atiende:
MADRE: ¡Es de verdad! ¿No lo ve? Es un niño pequeño de carne y hueso … ¿o no lo es?
EXPERIMENTADOR: Ni un médico notaría la diferencia sin una radiografía del cráneo. Daryl no fue concebido en un útero, sino en un tubo de ensayo, con un cerebro electrónico creado por nosotros. Está creciendo como un niño normal …
PADRE: Pero ¿por qué?
EXPERIMENTADOR: Porque los cinco sentidos del cuerpo humano son el método más rápido y más eficaz de programación jamás inventado.
Daryl es una versión de la máquina–niño pronosticada por Turing con dos importantes alteraciones: el método de programación y el propósito. Recordemos lo que decía Turing[146]:
En lugar de tratar de producir un programa para simular la mente adulta, ¿por qué no intentar producir uno que simule la de un niño? Si se le sometiera a un curso apropiado de educación uno obtendría la mente de un adulto. Presumiblemente el cerebro del niño es algo como un cuaderno que uno compra en la papelería. Un mecanismo bastante sencillo, y un montón de hojas en blanco. …. No será posible aplicar exactamente el mismo proceso de enseñanza a la máquina que a un niño normal. Por ejemplo, no tendrá piernas, por lo que no se le puede pedir que salga y llene el cubo de carbón. Posiblemente no podrá tener ojos. Y por bien que estas deficiencias puedan ser superadas por una ingeniería inteligente, uno no podría enviar la criatura a la escuela sin que los otros niños se burlaran de ella. … . No debemos preocuparnos demasiado por las piernas, los ojos, etc.
…
Podemos esperar que, al final, las máquinas compitan con los hombres en todos los campos puramente intelectuales. ¿Pero cuáles son los mejores para comenzar? Incluso ésta es una decisión difícil. …. Mucha gente piensa que una actividad muy abstracta, como jugar al ajedrez, sería lo mejor. También se puede sostener que es mejor proporcionar a la máquina los mejores órganos sensoriales que el dinero pueda comprar y luego enseñarle a comprender y hablar inglés. Este proceso podría seguir la enseñanza normal de un niño. Se señalarían y nombrarían cosas, etc. Una vez más, no sé cuál es la respuesta correcta, pero creo que deberían probarse ambos enfoques.
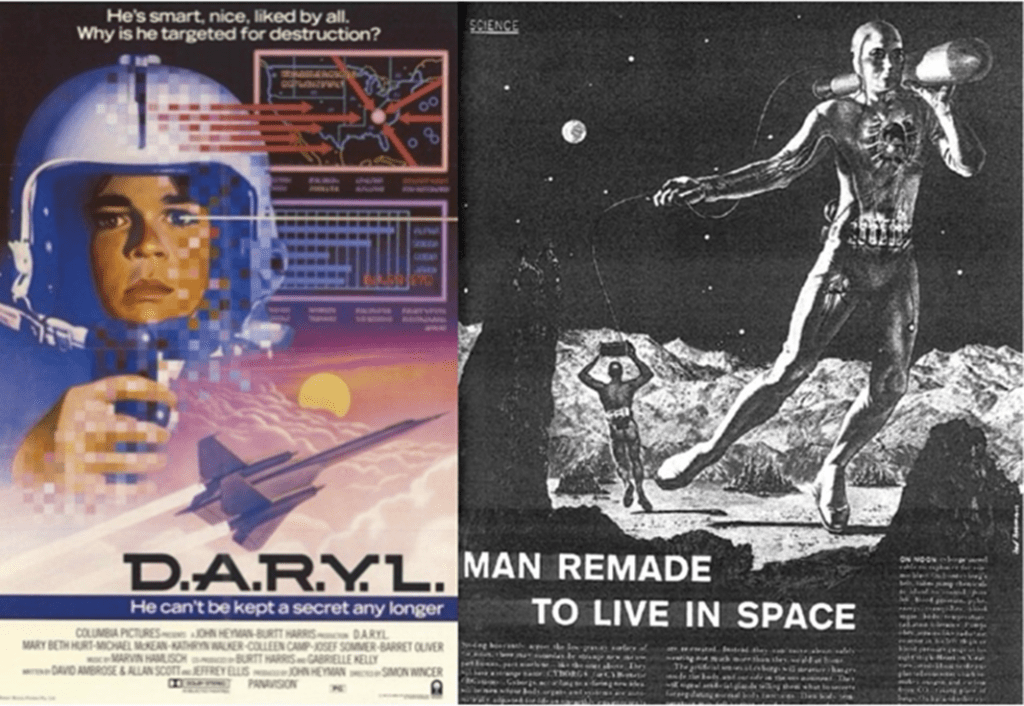
Los responsables del proyecto DARYL tomaron la máquina niño de Turing al pie de la letra, y para ellos está claro el método de enseñanza que se debe seguir: dotar a la criatura concebida en un laboratorio de un cuerpo que se encargaría de programar su cerebro electrónico haciendo de intermediario entre éste y el mundo. Desde luego, ellos harían el trabajo del experimentador de Turing, corrigiendo desviaciones e introduciendo mejoras acelerando así el proceso de aprendizaje. Por otra parte, el propósito de Daryl era menos lúdico: lejos de ser un puro desafío intelectual como era el juego de la imitación, estaba concebido para la guerra, el poder y el dominio de la fuerza —para ‘la destrucción’ dice el cartel de la película (figura 4.4(a)) —.
Por atractiva o desconcertante que pueda parecernos la idea, aún estamos lejos de crear un Daryl, aún nos queda mucho para disponer de un cerebro electrónico que cumpla los requisitos de complejidad y tamaño que le permitan ser insertado en un cráneo humano y conectado a la red del cuerpo sin rebajar un ápice las capacidades del mismo. Aún estamos lejos de la vida artificial. Como alternativas a Daryl tenemos los robots humanoides y el ciborg.
§
En septiembre de 1960 apareció en la revista Astronautics un artículo de Manfred E. Clynes y Nathan S. Kline titulado “Cyborgs and space”[147]. Clynes era científico investigador encargado del Laboratorio de Simulación Dinámica en el Rockland State Hospital, y desde hacía diez años se dedicaba al diseño y desarrollo de instrumentación para medidas fisiológicas, transductores ultrasónicos y sistemas electrónicos de proceso de datos. Kline era, en la misma institución, director de investigación desde 1952, y profesor de psiquiatría clínica en el Columbia University College of Physicians and Surgeons desde 1957. El artículo de Astronautics estaba basado en un trabajo anterior que con el título “Drugs, Space and Cybernetics” se había presentado en un simposio sobre aspectos psicofisiológicos de los vuelos espaciales, celebrado en mayo de ese mismo año en San Antonio, Texas, bajo el patrocinio de la AF School of Aviation Medicine. Y comienza con estas palabras[148]:
Los viajes espaciales retan a la humanidad no solo tecnológicamente sino espiritualmente también, por cuanto invitan al hombre a tomar parte activa de su propia evolución biológica. Los avances científicos del futuro deben por ello utilizarse para permitir la existencia humana en entornos que difieren radicalmente de aquellos provistos por la naturaleza tal como los conocemos.
El artículo está dedicado a realizar una serie de propuestas de cómo adaptar el cuerpo humano a un ambiente inhabitual, en particular aquel que configuran las condiciones propias de los viajes espaciales: alteraciones del sueño, problemas metabólicos, control térmico, oxigenación y eliminación del dióxido de carbono, hidratación y eliminación de fluidos corporales, función vestibular, control cardiovascular y presión, problemas de percepción, invariancia sensorial y privación de la acción, campos gravitatorio y magnético alterados, con todos los problemas psíquicos que éstas puedan acarrear. Todas las propuestas están orientadas a ensanchar el rango de funcionamiento de los sistemas ‘homeostáticos’ complementando los naturales con modificaciones químicas, psicológicas y electrónicas teniendo en cuenta sus aspectos ‘cibernéticos’. Consideran la posibilidad de fabricar atmósferas artificiales, de encapsularnos, para vivir en el ambiente hostil, pero, dicen, la burbuja «estalla fácilmente», y optan por la solución de adaptarse al ambiente. Saben que algunas de las soluciones propuestas suenan a ciencia ficción[149]:
A modo de ilustración, puede haber maneras más eficientes de llevar a cabo las funciones del sistema respiratorio que respirar, que es engorroso en el espacio. La solución que proponemos para el futuro no muy lejano es relativamente simple: ¡no respirar!…. Una pila de combustible inversa, capaz de reducir CO2 a sus componentes con eliminación de carbono y recirculación de oxígeno, eliminaría la necesidad de la respiración pulmonar.
Para este sistema hombre–máquina integrado y autorregulado, a cuya realización contribuirán disciplinas diversas, desde la psicología hasta la teoría de control, proponen el nombre de “Ciborg”, acrónimo de cibernético y orgánico: «El propósito del Ciborg», dicen, «como el de su propio sistema homeostático, es proporcionar un sistema organizativo en el cual se resuelvan automática e inconscientemente tales problemas robóticos, dejando al hombre libre para explorar, crear, pensar y sentir». De nuevo, la máquina liberando al ser humano de la servidumbre, solo que en esta ocasión máquina y ser humano se confunden.
Las propuestas de Clynes y Kline fueron hechas para los viajes espaciales pero, como tantas veces ocurre, han sido aplicadas a nuestra vida en la Tierra, en la que a veces, desgraciadamente, encontramos el ‘ambiente hostil’ de la enfermedad. Hoy podemos regular nuestro nivel de glucosa mediante bombas de insulina o nuestro ritmo cardiaco utilizando marcapasos, ayudar a nuestro corazón maltrecho con un dispositivo de asistencia ventricular o a nuestra deficiente función renal mediante máquinas de diálisis; y hasta sustituir nuestros órganos fatigados por sus homólogos artificiales por medio del uso de, entre otros avances, sistemas microelectromecánicos y nanotecnología; o utilizar un dispositivo médico que funciona con pilas, implantado quirúrgicamente, llamado neuroestimulador, similar a un marcapasos cardíaco, para administrar estimulación eléctrica a áreas específicas del cerebro que controlan el movimiento, bloqueando las señales nerviosas anormales que causan temblores y otros síntomas de la enfermedad de Parkinson; o reemplazar nuestros miembros estragados o perdidos a causa de la enfermedad o los accidentes por émulos electromecánicos que aventajan a la pata de palo de Long John Silver como lo vivo a lo inerte. Ya en 1985, Robert A. Freitas escribió[150]:
La emergente simbiosis ente hombre y máquina impregnará nuestras vidas más profundamente de lo que muchos de nosotros hemos soñado. Las máquinas se están casando físicamente con el cuerpo humano. Con el tiempo la distinción entre humano y máquina empezará a desdibujarse, dando lugar a organismos cibernéticos híbridos, o ciborgs, la simbiosis final hombre–máquina.
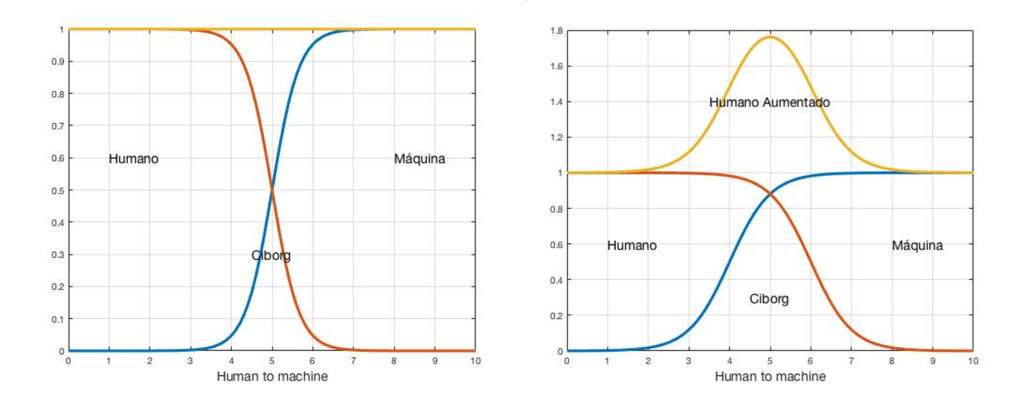
En su artículo escribe ‘la simbiosis final’ porque considera que los ciborg son el punto culminante de una cadena de máquinas semejantes a robots que incluye dispositivos remotos para manipular sustancias peligrosas u operar en ambientes inaccesibles al ser humano, dispositivos para rehabilitar al discapacitado o para llevar a cabo intervenciones quirúrgicas. En la figura 4.5 se muestran dos alternativas de esa simbiosis final: el humano completado o el humano aumentado. En la primera, las partes ‘artificiales’ solo vienen a reparar lo dañado o reponer lo perdido, y el resultado final es siempre un ser humano completo. En la segunda, al tiempo que se repara o se repone se consigue, por otros medios «más simples, más flexibles y más rápidos» tal como se dice en R.U.R, mejorar lo que nos ha dado la naturaleza.
[122] Isaacson, W. (2014). Los innovadores. Debate, pp. 246–256.
[123] Licklider, J. C. R. (1960). Man–Computer Symbiosis. IRE Transactions on Human Factors in Electronics, HFE-1(March):4–11. p. 4.
[124] Isaacson, op. cit., p. 250.
[125] Licklider, op. cit., p. 4.
[126] Ver, e.g.: Allgöwer, F., Borges de Sousa, J., Kapinski, J., Mosterman, P., Oehler- king, J., Panciatici, P., Prandini, M., Rajhans, A., Tabuada, P., and Wen- zelburger, P. (2019). Position paper on the challenges posed by modern applications to cyber–physical systems theory. Nonlinear Analysis: Hybrid Systems, 34:147–165.; Gil, M., Albert, M., Fons, J., and Pelechano, V. (2020). Engineering human- in-the-loop interactions in cyber-physical systems. Information and Software Technology, 126:106349; Yildiz, Y. (2020). Cyberphysical Human Systems. An Introduction to the Special Issue. IEEE Control Systems Magazine, 40(6):26–28.
[127] Craik, K. J. W. (1947). Theory of the Human Operator in Control Systems. I The Operator as an Engineering System. British Journal of Psychology, 38(2):56–61.
128] Craik, K. J. W. (1948). Theory of the Human Operator in Control Systems. II Man as an Element in a Control System. British Journal of Psychology, 38(3):142–148.
[129] Craik, 1948, p. 142.
[130] Craik, K. (2010). The Nature of Explanation. Cambridge University Press.
[131] McRuer, D. T. and Krendel, E. S. (1959a). The human operator as a servo system element. Journal of the Franklin Institute, 267(5):381–403; McRuer, D. T. and Krendel, E. S. (1959b). The human operator as a servo system element. Journal of the Franklin Institute, 267(6):511–536.
[132] McRuer and Krendel, 1959a, p. 381.
[133] Yildiz, op. cit.
[134] Protte, M., Fahr, R., and Quevedo, D. E. (2020). Behavioral Economics for Humam-in-the-Loop Control Systems Design. IEEE Control Systems Magazine, 40(6):57–76.
[135] Eraslan, E., Yildiz, Y., and Annaswamy, A. M. (2020). Shared Control Between Pilots and Autopilots. IEEE Control Systems Magazine, 40(6):77–97.
[136] Sparrow, D., Kruger, K., and Basson, A. (2019). Human Digital Twin for integrating human workers in Industry 4.0. International Conference on Competitive Manufacturing.
[137] Gelernter, D. (1992). Mirror Worlds: or The Day Software Puts the Uni verse in a Shoebox. How it Will Happen and What it Will Mean. Oxford University Press, p. 3.
[138] Grieves, M. (2016). Origins of the Digital Twin Concept. https://www.researchgate.net/ publication/307509727.
[139] No confundir con algunas técnicas de generación y animación de imágenes por ordenador útiles para la industria del entretenimiento: una película como 300, un anuncio en el que de nuevo habla Lola Flores, o el poeta romántico John Keats recitando sus propios poemas 200 años después de muerto.
[140] Gelernter, op. cit., p. 132.
[141] Gelernter, op. cit., p.132.
[142] Lo que va entre corchetes es añadido mío.
[143] Gelernter, op. cit., p.132.
[144] Gelernter, op. cit., p.134.
[145] Andersen, R. (2019). The Intention Machine. Scientific American, April:25– 31; Dey, N., Ashour, A. S., Shi, F., Fong, S. J., and Tavares, J. M. R. S. (2018). Medical cyber-physical systems: A survey. Journal of Medical Systems, 42(74); Schirner, G., Erdogmus, D., Chowdhury, K., and Padir, T. (2013). The Future of Human-in-the-Loop Cyber-Physical Systems. Computers, January:36– 45.
[146] Turing, A. M. (1950). Computing Machinery and Intelligence. Mind, LIX(236):433–460, pp. 456 y 460.
[147] Clynes, M. E. and Kline, N. S. (1960). Cyborgs and space. Astronautics, September:26–27,74–76.
[148] Clynes and Kline, op. cit., p. 26.
[149] Clynes and Kline, op. cit., p. 27.
[150] Freitas, R. A. (1985). The birth of cyborg. En: Minsky, M., editor, Robotics, pp. 147–183. Anchor Press Doubleday, p. 147.
Vinagre, Blas M. «Sistemas ciberfísicos». Adyacente posible, 2 de abril de 2026. https://adyacenteposible.com/2026/04/02/sistemas-ciberfisicos-el-hombre-entre-las-maquinas-blas-vinagre/
